EXT2160¶

产品介绍¶
EXT2160外置驱动器是基于Trinamic TMC2160芯片设计的高性能驱动器,可提供平滑低噪音的驱动能力,且可实时检测电机运行状态,拥有堵转检测功能,用以实现无限位开关复位。采用高性能MOS管,其最大峰值电流可以达到6.6A,通过更换采样电阻,其电流可以进一步达到15A峰值。
驱动器可以使用简单的脉冲/方向/使能信号来控制,工作在独立模式,也可以用SPI来控制以获得更多智能的应用。在所有的信号接口均配备了高达3750V的数字隔离器,以避免高压和方向电动势对控制器造成不可逆的损坏。
该驱动器可以用于任何使用步进电机的场合,并附赠StepStick转接板,便于安装在需要高压大电流驱动的3D打印机上。
特性¶
- 基于TMC2160
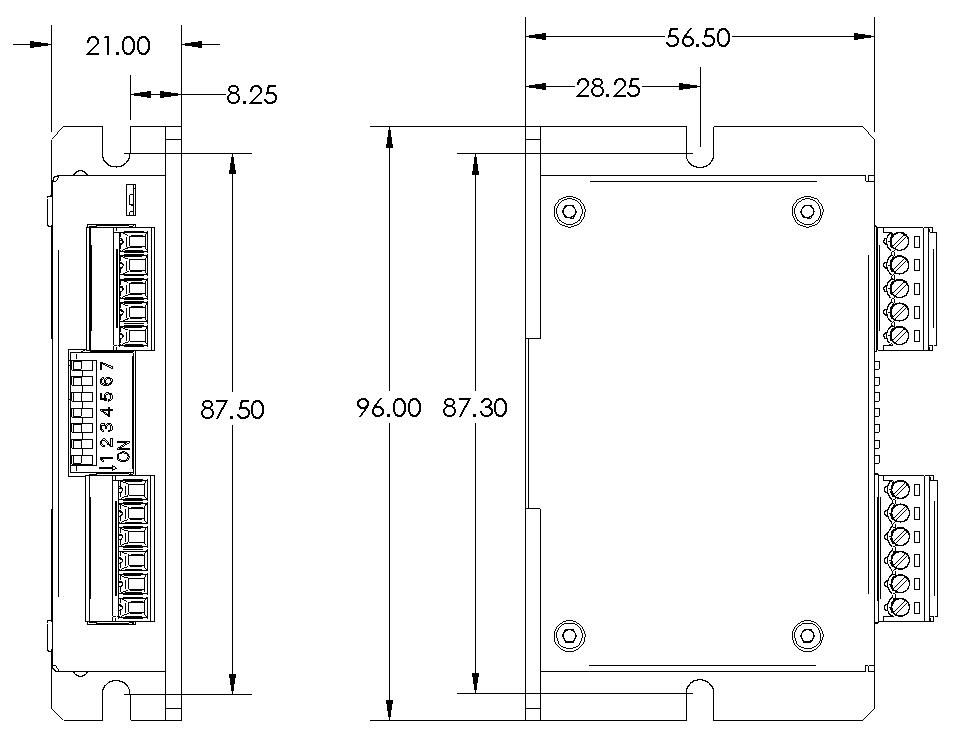
- 超小尺寸:96x57x21
- 19-60V宽电压支持
- 高性能MOSFET,默认最大峰值电流6.6A,更换Rs可达15A峰值(需更换连接方式)
- 独立模式,Step/Dir 接口,带MicroPlyer™细分补偿,实现256高细分
- 支持SPI模式,完美工作于Marlin/Klipper等固件
- 支持无限位开关复位/电流节能自动调节/静音平滑运动
- 板载3750V数字隔离
- 可选StepStick转接板,SPI直连驱动器
- 铝制外壳,兼顾美观和散热
- 2x5 DC3 简牛信号接口,含SPI和S/D
- 1x7 拨码选择开关,用于独立模式电流调节和功能配置
技术规格¶
| 适用范围 | 适用于驱动两相步进电机 |
|---|---|
| 输入电压 | 19-60VDC(Peak) |
| 输入电流 | 8A Max |
| 驱动能力 | 6.6A Peak默认,更改连接器和采样电阻可达15A Peak |
| 最大脉冲频率 | 9MHz |
| 待机电流衰减 | 50% |
| 接口 | 3.81mm 5P 插座 + 3.81mm 6P 插座 + 2X5P DC3 插座 |
| 运行模式 | STEP/DIR独立模式 / SPI模式 |
| 环境温度 | 0-40°C (32-104°F) |
| 环境湿度 | 最大90%,无结露 |
| 指示灯 | 1个红灯指示DIAG,和1个绿灯指示5VDC |
| 隔离 | 3750V,最大150Mhz |
| 保护 | 过压保护,欠压保护,过温保护,过流保护 |
| 细分 | 外部8-64细分输入可调,内部256细分插补 |
| Trinamic 技术 | StealthChop 2™ 无噪声、高精度斩波算法,用于电机的静止和运动状态下的静音控制。StealthChop2在 StealthChop 的基础上,加快了电机运动加减速特性,降低了所需的电流最小值。 spreadCycle™ 高精度斩波算法,用于高动态电机运动和产生绝对干净的电流波。低噪音、低共振和 低振动斩波器。 DcStep™ 与负载相关的速度控制。电机尽可能快地移动,不失步 StallGuard2™ 无传感器的堵转检测和机械负载测量。 CoolStep™ 根据负载自适应电流,可将能耗降低 75 %。 MicroPlyer™ 细分内插器,用于从全步开始,以较低细分输入获得 256 微步的平滑度 |
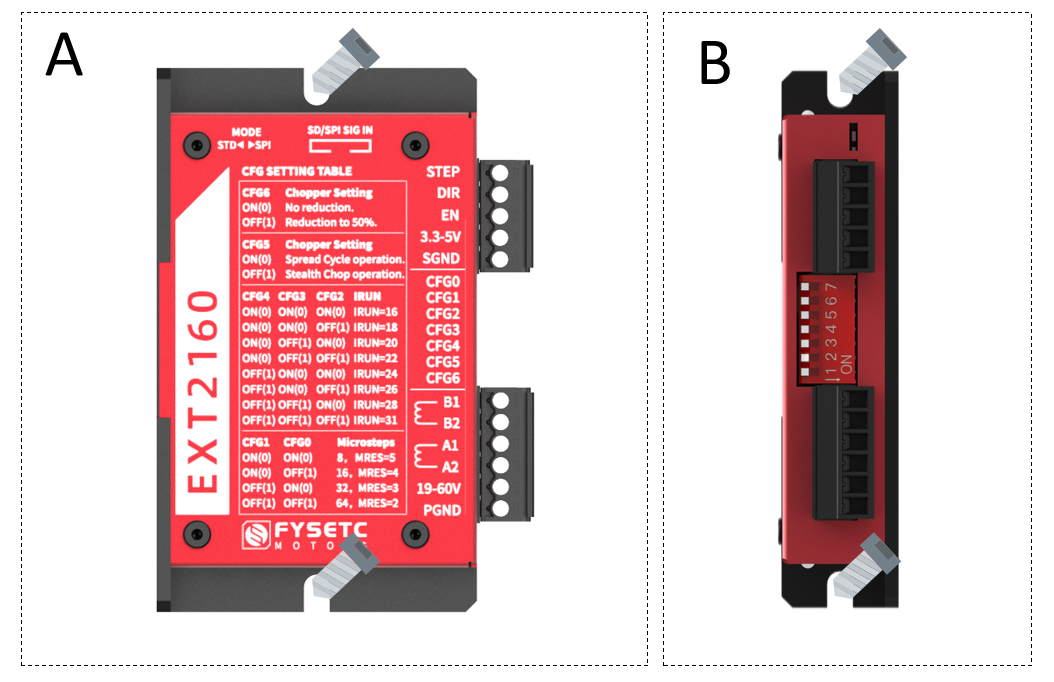
驱动器安装¶
用户可以用驱动器散热底座的宽边或窄边进行安装,即A方式或者B方式。为达到良好散热效果,建议采用窄边安装。驱动器的功率器件会发热,如果连续工作在高输入电压(>24V)、大功率(>5A)条件下,应扩大有效散热面积或强制冷却。
请不要在空气不流通的地方或者环境温度超过40°C的地方使用;
不要将驱动器安装在潮湿或有金属屑的地方。
驱动器接口连接¶
要使驱动器能正常工作,需要提供以下必要条件:
-
推荐使用19-55V合适功率的稳压电源,具体根据所带电机确定。(驱动器的极限电压是60V,不代表可直接使用60V的电源进行工作,因为电源在开启或者电机工作时都会有导致电压瞬间升高的可能,极有可能损坏驱动器)
-
合适的控制信号源,如控制板,PLC等;
-
相匹配的步进电机。
连接电源¶
-
如果您的电源输出端没有保险丝或一些别的限制短路电流的装置,可在电源和驱动器之间放置一个 适当规格的快速熔断保险丝(规格不得超过8Amps)以保护驱动器和电源,请将该保险丝串联于电源 的正极和驱动器的”19-60V“位置之间。
-
将电源的正极连接到驱动器的“19-60V”位置,将电源的负极连接到驱动器的“PGND”位置。
-
如果要同时保证高效率和低噪音,则驱动器供电电压至少5倍于电机额定相电压(即电机额定相电 流×相电阻)。
-
如果您需要电机获得更好的高速性能,则需要提高驱动器供电电压。
-
如果使用稳压电源供电,要求供电电压不得超过50V。
-
如果使用非稳压电源供电,要求电压不得超过34V。因为非稳压电源的额定电流是满载电流;在负载很轻,例如电机不转时,实际电压高达电源额定电压的1.4倍。
-
当电机减速的时候,它会像发电机一样将负载的动能转化为电能。一些能量会被驱动器和电机消耗 掉。如果您的应用中有**大的负载以高速运行**,相当大的动能会被转换成电能。通常简单的线性电源 有一个大的电容来吸收这些能量而不会对系统造成损坏。开关电源往往会在过压的状况下关闭,多 余的能量会回传给驱动器,可能会造成驱动器的损坏。为了预防这种情况,我们推荐使用如下图所 示的RC880再生放电钳。再生放电钳安装在电源和驱动器之间。
-
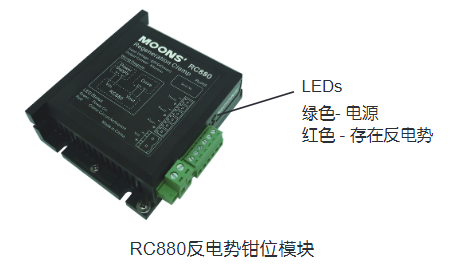
连接电机¶
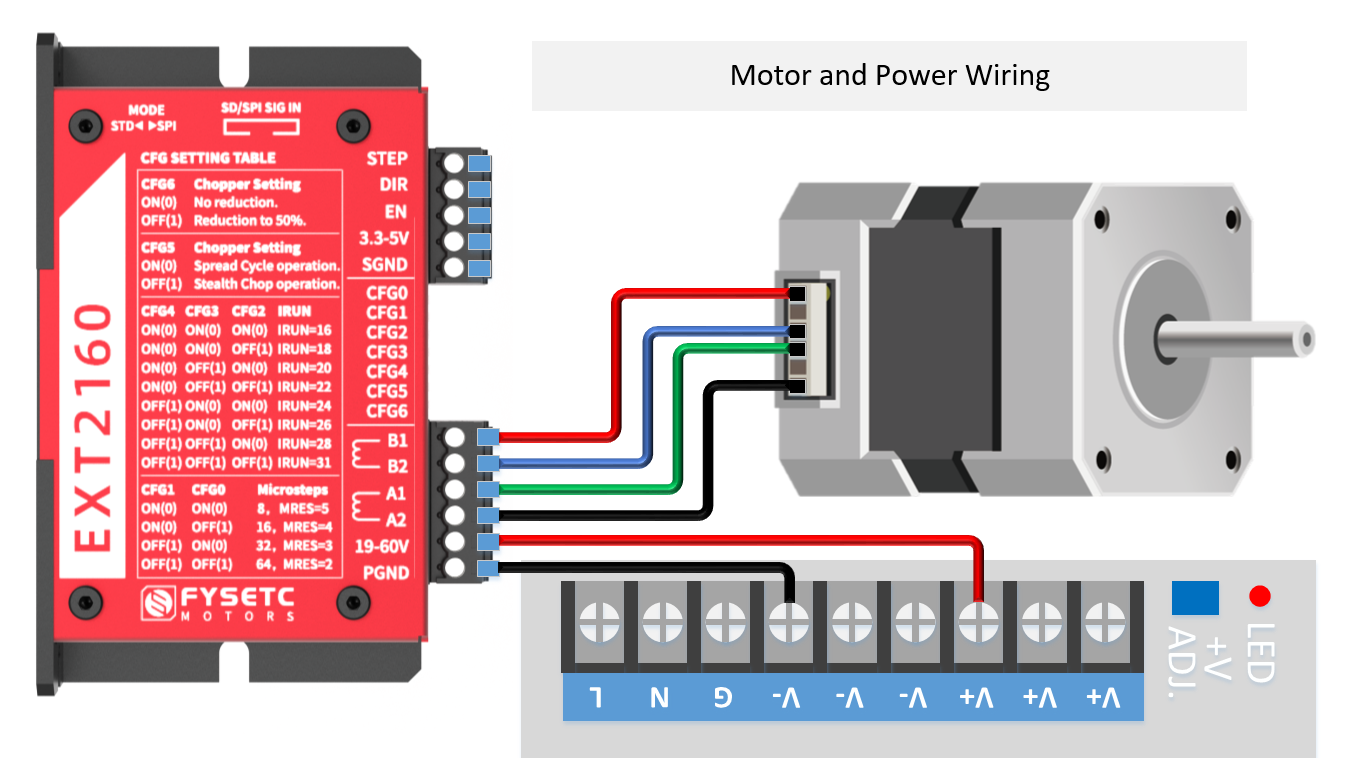
直接连接:将B1/B2连接于电机的一相,A1/A2连接于电机的另外一相即可;
并联接法:一般用于转动速度要求较快,力矩要求不算高的场合;
串联接法:一般用于力矩大,转动速度要求不高的场合。但由于串联接法的使用过程中,通过的电流较大,所以发热量也会比一般并联电机大。(一般步进电机发热的温度,达到90度都是正常的)
连接输入输出控制信号¶
驱动器是基于TMC2160设计的,可以提供独立模式和SPI模式两种工作方式。一般的应用,如CNC或者类似设备可以直接使用独立模式,配置简单。如果用在3D打印机上推荐使用SPI模式,以获得更智能的驱动方式,如果无限位开关复位。目前Klipper和Marlin均能完美支持TMC2160,具体配置参考相应固件说明。
独立模式¶
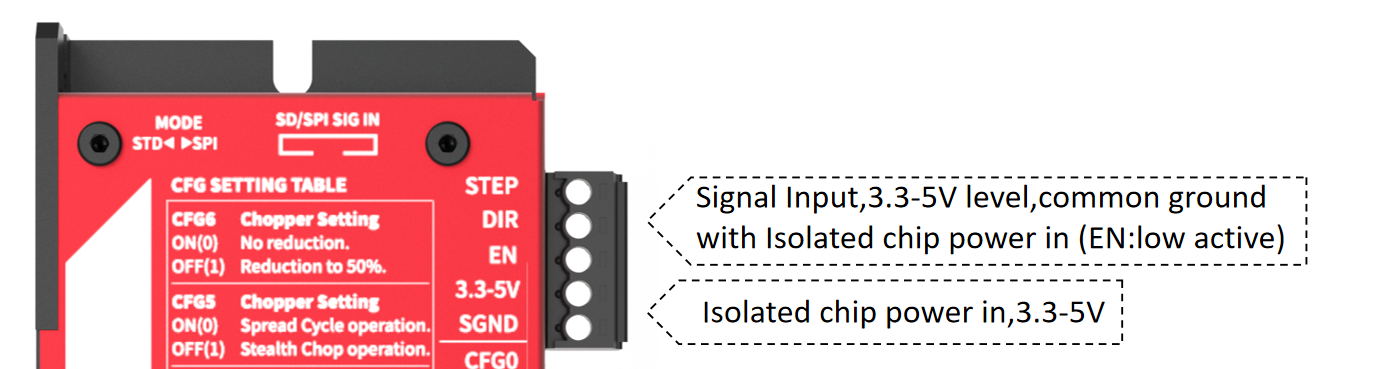
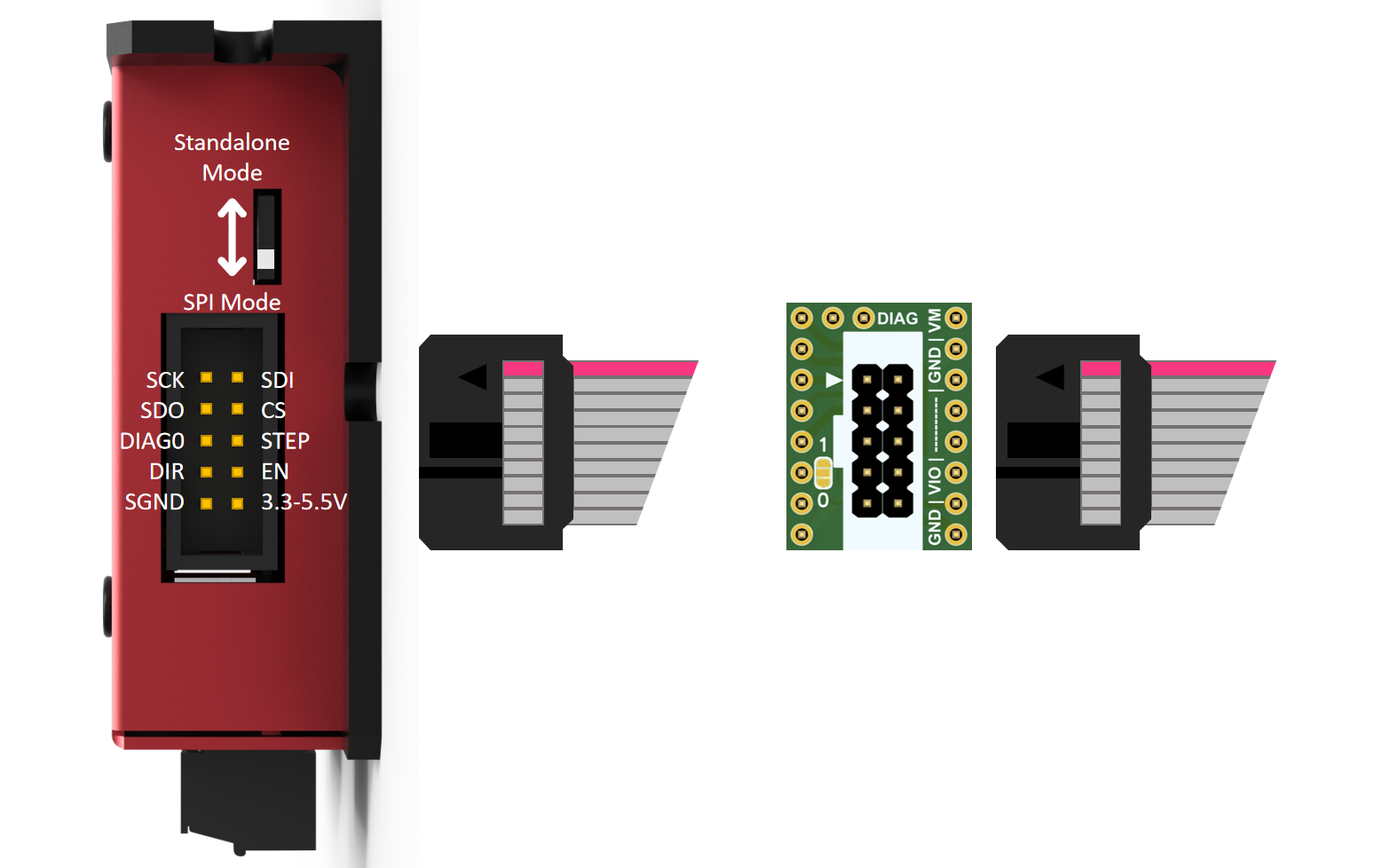
使用独立模式的时候,根据驱动器正面刻字或者上图所示,将拨码开关向上拨动,使其停在“standalone Mode”/“STD”的位置,然后发送正确的信号到驱动器即可。信号输入可以是2x5P DC3 插座处,也可以是下图所示的3.81间距 5P连接器,与一般光耦隔离驱动器不同的是此处的“3.3-5V”“SGND”必须连接,用于为数字隔离器供电,且输入信号应与该供电共地。
脉冲和方向信号¶
EXT2160驱动器有2个高速输入口STEP和DIR,数字隔离,可以接受3.3-5VDC单端信号,最高电压可达5.5V,信号下降沿有效。 电机运转方向取决于DIR电平信号,若DIR信号为低电平时,电机顺时针运转; 则DIR悬空或高电平时,电机逆时针运转。
使能信号¶
EN输入使能或关断驱动器的功率部分,信号输入为数字隔离,可接受3.3-5VDC单端信号,信号最高可达5.5V。EN信号低电平时,驱动器为使能状态,电机正常运转; EN信号悬空或为高电平时,驱动器功率部分关断,电机无励磁。
参数设定¶
使用独立模式时(即SPI_MODE 引脚连接到 GND时),在这种模式下,驱动程序充当纯 STEP 和 DIR 驱动程序。 SPI 和单线关闭。 驱动器在 SpreadCycle 模式或 StealthChop 模式下工作。 所有寄存器参数设定是通过7位DIP拨码开关来配置CFG0-CFG6(默认上拉至VCC_IO)实现的,下压到ON即为连接到GND,不动即为OFF,默认连接到VCC_IO。具体配置参考如下:
细分设置¶
CFG0/CFG1:
| CFG1 | CFG0 | Microstep Setting |
|---|---|---|
| GND | GND | 8 microsteps, MRES*=5 |
| GND | VCC_IO | 16 microsteps, MRES=4 |
| VCC_IO | GND | 32 microsteps, MRES=3 |
| VCC_IO | VCC_IO | 64 microsteps, MRES=2 |
*MRES:实际细分。在软件设定了 INTERPOLATE 情况下,外部不论按照多少细分输入脉冲,内部都会自动计算并插补到256细分运行,以使得步进电机运行平滑,静音。
电流设置¶
CFG4/CFG3/CFG2: CONFIGURATION OF RUN CURRENT
| CFG4 | CFG3 | CFG2 | IRUN_Setting | I-rms | I-peak |
|---|---|---|---|---|---|
| GND | GND | GND | IRUN=16, | 2.44 | 3.45 |
| GND | GND | VCC_IO | IRUN=18 | 2.73 | 3.86 |
| GND | VCC_IO | GND | IRUN=20 | 3.02 | 4.27 |
| GND | VCC_IO | VCC_IO | IRUN=22 | 3.3 | 4.67 |
| VCC_IO | GND | GND | IRUN=24 | 3.59 | 5.08 |
| VCC_IO | GND | VCC_IO | IRUN=26 | 3.88 | 5.48 |
| VCC_IO | VCC_IO | GND | IRUN=28 | 4.17 | 5.89 |
| VCC_IO | VCC_IO | VCC_IO | IRUN=31 | 4.6 | 6.6 |
EXT2160驱动器默认板载0.05Ω采样电阻,即其能达到最大的Irms=4.7A,Ipeak=6.6A,如果使用独立模式,EXT2160的Irms电流在2.35-4.7A之间可调,Ipeak在3.3-6.6A之间可调。
所以如果使用的是2.35A以下的电机则必须使用SPI模式,否则会电流过大,导致电机烧毁。
若需要更小的电流则必须使用SPI模式进行配置或者在独立模式下改变PCB上采样电阻的大小。(驱动器PCB上的0.05Ω的采样电阻是由两个0.1Ω电阻并联而成,可以拆除其一,使得采样电阻变为0.1Ω,这样在独立模式下,EXT2160的Irms电流在1.15-2.3A之间可调,Ipeak在1.65-3.3A之间可调。如需更多电流范围配置,可参考下表更改采样电阻Rsense,按照下列公式计算有效电流Irms,更多关于电流等内容请参考TMC2160规格书第8章节) $$ Irms=\frac{0.325}{0.05}×\frac{Irun+1}{32}×\frac{1}{\sqrt2} $$ Rsese和电流的关系表:
| RSENSE [Ω] | RMS current [A] (CS=31) | Sine wave peakcurrent [A] (CS=31) |
|---|---|---|
| 0.22 | 1.1 | 1.5 |
| 0.15 | 1.6 | 2.2 |
| 0.12 | 2.0 | 2.8 |
| 0.10 | 2.3 | 3.3 |
| 0.075 | 3.1 | 4.4 |
| 0.066 | 3.5 | 5.0 |
| 0.050 | 4.7 | 6.6 |
| 0.033 | 7.1 | 10.0 |
| 0.022 | 10.6 | 15.0 |
Chopper 模式选择¶
CFG5: SELECTION OF CHOPPER MODE
| CFG5 | Chopper Setting |
|---|---|
| GND | SpreadCycle 模式. (TOFF=3) |
| VCC_IO | StealthChop 模式. (GCONF.en_PWM_mode=1) * 在使用 StealthChop 前,请确保电机休息最少 100ms (假设最小的 fCLK 为 10MHz) * |
StealthChop 是电压斩波器的原理。除了电机机械滚轮轴承产生的噪音,它特别保证了电机在静止和慢速运行时能绝对安静。不同于其他电压模式斩波器, StealthChop 2 不需要任何配置。通电后,它会在第一次运动中自动学习最佳设置,并进一步优化后续运动中的设置。初始的归零过程足以使系统完成StealthChop最佳配置。也可以配置初始参数加快自学习过程。StealthChop 2 通过对电机速度的变化立即做出反应,允许高的电机动态。
对于高动态的应用,spreadCycle是除StealthChop 2之外的选项。它可以通过输入引脚(独立模式)或SPI或UART接口配置。StealthChop 2和spreadCycle甚至可以结合使用,以达到两者的最佳效果:StealthChop2用于无噪音的静止状态,无声平滑的性能,spreadCycle用于高动态,低振动和最高的峰值速度。
spreadCycle是周期斩波模式。它在很宽的速度和负载范围内提供平稳的操作和良好的共振阻尼。SpreadCycle方案集成快衰减周期并自动调节,以保证平滑过零。
StealthChop 2优势:
- 显著改善了低成本电机的性能
- 电机运行平稳安静
- 绝对没有待机噪音
- 降低机械共振产生改善的扭矩
配置保持电流自动降低¶
CFG6: CONFIGURATION OF HOLD CURRENT REDUCTION
| CFG6* | Chopper Setting |
|---|---|
| GND | 不开启自动降低. IHOLD=IRUN |
| VCC_IO | 开启自动降低,等于运行电流的一半. IHOLD=½ IRUN |
当驱动到与 CFG5 不同的电平时,CFG6 引脚消耗大量电流 (20mA),因为输出驱动器试图使 CFG6 电平等于 CFG5。 因此,需要一个 0 欧姆的电阻来上拉/下拉 CFG6。 因此,只有在外部 VCC_IO 电源为 3.3V 电平时,才建议将 CFG6 设置为与 CFG5 不同。
注意: 默认情况下DIAG输出未配置, 但是它们可以在切换到独立模式之前使用SPI接口激活并配置。
SPI模式¶
SPI 接口是与总线时钟同步的位串行接口。对于从总线主机发送到总线从机的每一位,另一位同时从从机发送到主机。 SPI 主机和 TMC2160 从机之间的通信始终包括发送一个 40 位命令字和接收一个 40 位状态字。 SPI 命令速率通常是每个完整电机运动的几个命令。
使用SPI模式的时候,根据驱动器正面刻字或者上图所示,将拨码开关向下拨动,使其停在“SPI Mode”/“SPI”的位置,然后发送正确的信号到驱动器即可。信号输入只能从 2x5P DC3 插座处接入,使用随驱动器附赠的灰排线和SEXT10转接板即可直接连接到各类3D打印机主板。如果是其他控制板,则需要按照接口定义自行接线,与一般光耦隔离驱动器不同的是此处的“3.3-5V”“SGND”必须连接,用于为数字隔离器供电,且输入信号应与该供电共地。
参数设定¶
根据上方的公式,可以得出,SPI模式下的可以设置的电流如下: | I-peak | I-rms | Irun-setting | | ------ | ----- | ---- | | 0.20 | 0.14 | 0 | | 0.41| 0.29| 1| | 0.61| 0.43| 2| | 0.81| 0.57| 3| | 1.02| 0.72| 4| | 1.22| 0.86| 5| | 1.42| 1.01| 6| | 1.63| 1.15| 7| | 1.83| 1.29| 8| | 2.03| 1.44| 9| | 2.23| 1.58| 10| | 2.44| 1.72| 11| | 2.64| 1.87| 12| | 2.84| 2.01| 13| | 3.05| 2.15| 14| | 3.25| 2.30| 15| | 3.45| 2.44| 16| | 3.66| 2.59| 17| | 3.86| 2.73| 18| | 4.06| 2.87| 19| | 4.27| 3.02| 20| | 4.47| 3.16| 21| | 4.67| 3.30| 22| | 4.88| 3.45| 23| | 5.08| 3.59| 24| | 5.28| 3.73| 25| | 5.48| 3.88| 26| | 5.69| 4.02| 27| | 5.89| 4.17| 28| | 6.09| 4.31| 29| | 6.30| 4.45| 30| | 6.50| 4.60| 31|
固件配置¶
Klipper¶
参考 TMC2130 的配置,如安装到蜘蛛板 x 轴,配置如下
[tmc2130 stepper_x]
# 软件 SPI 管脚定义
spi_software_mosi_pin: PE14
spi_software_miso_pin: PE13
spi_software_sclk_pin: PE12
cs_pin: PE7
interpolate: True # 采用自动 256 细分
# diag1_pin: PB14
run_current: 0.800 # 运行电流
hold_current: 0.500 # 保持电流
sense_resistor: 0.05 # 采样电阻
#stealthchop_threshold: 99999 # stealthchop 阈值
Marlin¶
需要更改 Configuration.h 文件,例如配置 x 轴
#define X_DRIVER_TYPE TMC2160
同时修改 Configuration_adv.h 采样电阻值
#define X_RSENSE 0.05
其他¶
机械尺寸¶
DWG File:https://github.com/FYSETC/FYSETC-EXT2160/blob/main/EXT_2160%20V1.0.DWG
STEP File:https://github.com/FYSETC/FYSETC-EXT2160/blob/main/EXT_2160_V1.0.rar
购买¶
联系我们¶
QQ群:1041794121
Facebook小组:https://www.facebook.com/groups/197476557529090
Discord频道:https://discord.gg/Fb6FdND4